무엇을 도와드릴까요?

|
|
모서리 주변과 방해물 뒤쪽에 있는 피사체의 이미지 캡처 |
|
|
보이지 않는 목표물의 뒤쪽에서 산란되는 빛을 이용해 목표물을 3D 모델로 재구성 |
|
|
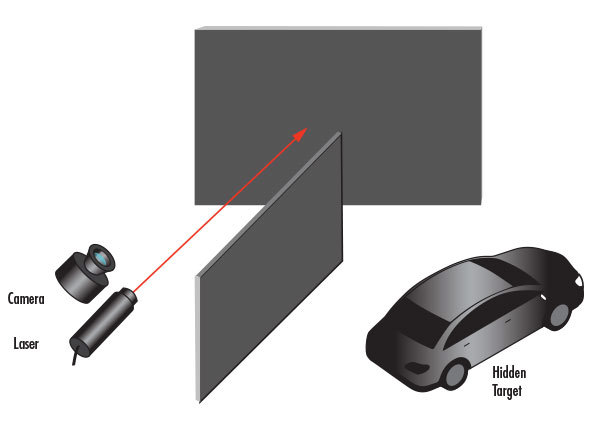
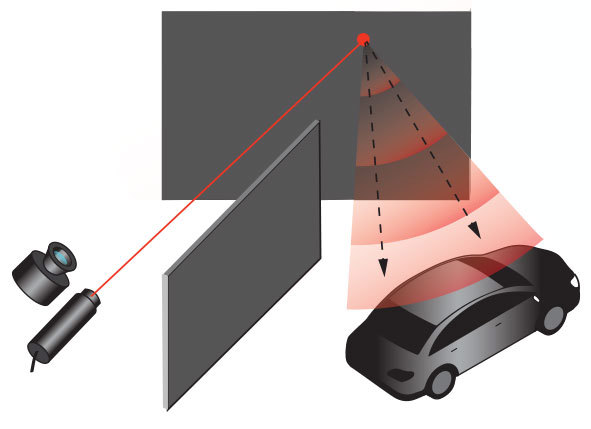
피사체 주변에 있는 레이저 광을 보이지 않는 목표물 위로 산란시킴 |
|
|
자율 주행 차량, 공중 보건, 의료 영상 처리 분야에 다양한 잠재적 이점 제공 |
일반적으로 피사체와 카메라 또는 피사체와 디텍터 간의 직접 가시선(direct line of sight)은 천문학에서 중력 렌즈로 인해 발생하는 광굴절과 같이 극단적인 케이스를 제외한 모든 이미징 용도에서 필수나 다름없습니다. 하지만 대부분의 이미징 용도에서는 직접 가시선을 직선으로 전파하는 빛으로 한정합니다. 다만 최첨단 연구로 인하여 방해물의 모서리와 주변부를 영상 처리할 수 있는 가능성이 열리면서 이러한 한계에도 변화가 일기 시작하였습니다. 레이저와 고감도 카메라 그리고 컴퓨터를 활용한 재구성 기법을 조합하면 피사체의 주변부에 빛을 산란해가며 방해물에 가려진 피사체를 감지할 수 있게 됩니다.
비가시선 영상 촬영 프로세스는 LiDAR (light detection and ranging) 처리 과정과 비슷하며 레이저 펄스를 피사체로 전송하고 피사체에서 다시 산란되는 빛의 전파 시간(time of flight)을 활용해 피사체와 디텍터 사이의 거리를 측정합니다. 하지만 비가시선 이미징은 또 다른 산란 과정을 이러한 프로세스에 추가하는 방식을 통해 방해물에 의해 가려진 피사체를 영상화합니다.1
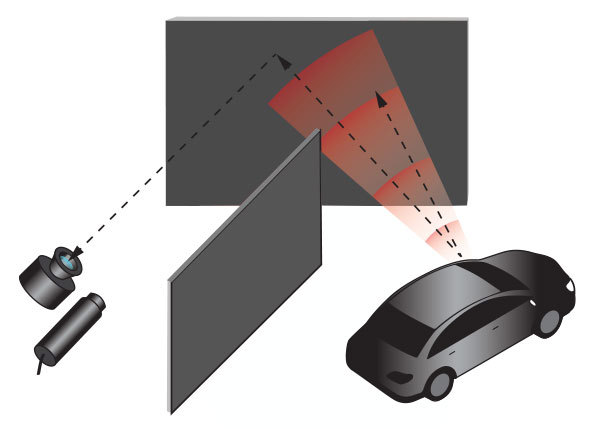
실시간으로 빛의 피코초 펄스와 펨토초 펄스 전파를 측정하기 위해서는 단광자 검출 애벌란시 광다이오드 어레이 카메라(single-photon avalanche photodiode array camera)와 같은 고감도 카메라가 필요합니다. 디텍터는 벽에서 바로 산란되는 빛의 초기 시그널과 목표물에서 산란되는 두 번째 시그널로 이루어진 두 개의 서로 다른 회수 신호(return signal)를 수신합니다. 그 다음 전파 시간 정보를 사용해 보이지 않는 목표물 위의 주어진 지점에서 전부 오버랩되는 일련의 타원체를 재현하고 카메라와 보이지 않는 목표물 사이의 거리를 계산용 소프트웨어로 계산한 뒤 목표물을 3D로 재구성합니다.
3D로 재구성된 피사체는 빛을 산란하는 다양한 개별 지점들의 집합으로 분해될 수 있습니다. 따라서 이러한 지점들을 전부 종합해야 피사체의 모형을 본래대로 재구성할 수 있게 됩니다. 디텍터로 회기 펄스를 100ps의 시간 해상도(temporal resolution)로 구별할 수 있을 경우 이는 대략 1.5cm의 숨겨진 목표물 상에서의 공간 해상도(spatial resolution)와 일치합니다. 1
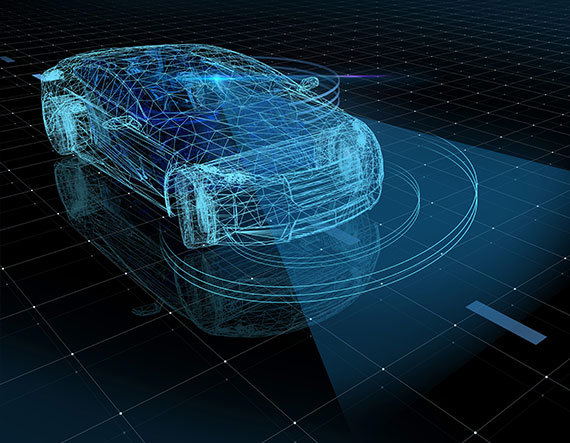
차량의 시야에 주변 차량이나 보행자가 들어오기 전에 이들을 감지하도록 함2

사법 기관, 소방, 응급 의료 서비스 활동 중에 안전 거리에서 위험한 상황에 처한 사람들을 발견할 수 있도록 함2
시스템의 가시선에 잡히지 않는 소형의 3D 구조물을 검사2
신규 기술을 실제 사례에 접목하고 실용적인 솔루션을 제시하는 일은 관찰자의 관점에서 그저 간단하고 위험해 보이지 않은 일처럼 보이지만 굉장히 도전적인 과제입니다. 비가시선 이미징의 주요 문제 중 하나는 디텍터로 되돌아가는 빛의 양이 제한적이라는 점에서 극소량의 빛만을 선택해 주변 광원과 구별을 할 수 있어야 합니다. 디텍터로 돌아가는 시그널은 두 번이나 연속적으로 일어나는 산란 현상의 결과물로서 매우 높은 손실을 초래합니다. 회수 시그널은 레이저 펄스당 한 개의 광자만큼이나 약한 신호일 수 있습니다.1
하지만 스탠포드 컴퓨터 이미징 연구소는 간접 태양광선이 비추는 야외에서 작동하는 비가기선 이미징 시스템을 개발하였습니다. 2 스탠포드 연구팀은 역반사 테이프로 만든 피사체를 벽에 가린 후 이를 영상화하는 데 성공하였으며 이는 향후 기술에 대한 바람직한 징조로 받아들일 수 있습니다.
센트럴 플로리다 대학교의 아리스티드 도가리우 연구소는 벽과 목표물에서 산란되는 레이저광 대신 벽에 부딪히는 빛의 공간적 간섭성(spatial coherence)을 이용해 비가시선 이미징을 연구 중에 있습니다.3 이러한 기술은 극초단 레이저 조명을 사용하지 않고도 보이지 않는 목표물을 모형화할 수 있기 때문에 실제 사례에 적용할 경우 휴대성이나 사용성이 더욱더 수월해질 것으로 예상됩니다.
비가시선 영상 기술이 상용 시스템에 보급되기까지 아직 더 많은 연구가 필요하지만, 차세대 영상 기술을 위한 전도유망한 솔루션임에는 틀림이 없습니다.
참고 문헌1. Faccio, Daniele. “Non-Line-of-Sight Imaging.” Optics and Photonics News, vol. 30, no. 1, Jan. 2019, pp. 36–43.
2. M. O’Toole, D.B. Lindell, G. Wetzstein, “Confocal Non-Line-of-Sight Imaging Based on the Light-Cone Transform”, Nature, 2018.
3. Batarseh, M., et al. “Passive Sensing around the Corner Using Spatial Coherence.” Nature Communications, vol. 9, no. 1, 2018, doi:10.1038/s41467-018-05985-w.
에드몬드 옵틱스는 비가시선 이미징 시스템에 사용되는 이미징 렌즈와 극초단 레이저 광학을 직접 설계하고 제조합니다.

 EO에서는 비가시선 이미징을 위한 풀 시스템을 취급합니까?
제일 처음에 벽에서 산란되는 레이저광은 보이지 않는 목표물에서 산란되는 두 번째 레이저광보다 출력 파워가 높지 않습니까?
EO에서는 비가시선 이미징을 위한 풀 시스템을 취급합니까?
제일 처음에 벽에서 산란되는 레이저광은 보이지 않는 목표물에서 산란되는 두 번째 레이저광보다 출력 파워가 높지 않습니까?
벽에서 산란되는 빛은 간접 피사체에서 산란되는 두 번째 빛보다 훨씬 강하지만 시간 분해능이 충분히 높은 고감도 디텍터로 이 두 가지 시그널을 구분할 수 있는 시간적 지연이 존재합니다.2
보이지 않는 목표물에서 두 번째 산란에 대한 시간적 지연이 캡처되면 컴퓨터 복원 소프트웨어로 피사체의 3D 모델을 재생성할 수 있습니까?
소프트웨어는 우선 모든 측정치를 3D 시공간 볼륨으로 저장합니다. 그런 다음 시간 축을 따라 측정치를 다시 샘플링하고 주파수 영역에서 역필터(inverse filter)로 결과물을 서로 얽혀가며 깊이 축을 따라 이 결과를 다시 샘플링한 뒤 숨겨진 피사체를 복원합니다. 2
데이터를 수집한 후 숨겨진 피사체를 3D 모델로 재구성하는 데 얼마나 많은 시간이 소요됩니까?
스탠포드 컴퓨터 이미징 연구실에 따르면 3D 모델 생성을 위해 비가시선 이미징 프로세스를 진행하는 시간은 고작 0.5초밖에 걸리지 않습니다. 2

















본사 및 지사별 연락처 확인하기
견적 요청 도구
재고 번호 입력 필요
Copyright 2023, 에드몬드옵틱스코리아 사업자 등록번호: 110-81-74657 | 대표이사: 이준호 | 통신판매업 신고번호: 제 2022-서울마포-0965호, 서울특별시 마포구 월드컵북로 21, 7층 (서교동, 풍성빌딩)
The FUTURE Depends On Optics®